

| Step | Action | Time |
|---|---|---|
| 1 |
Scan the hand Use EM3D (or similar) to capture a 360° scan of the residual limb. Export as .stl file. |
2–3 min |
| 2 |
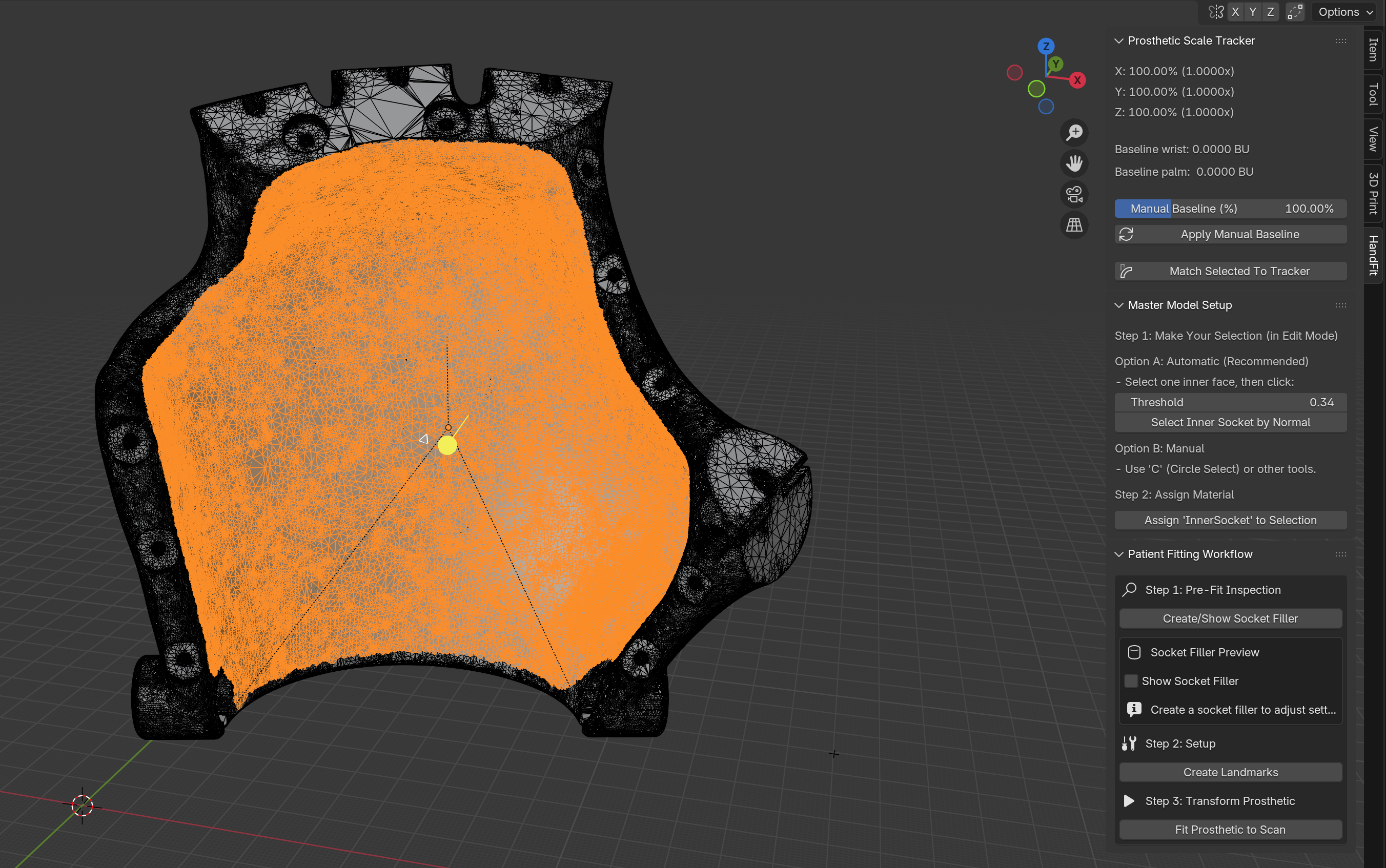
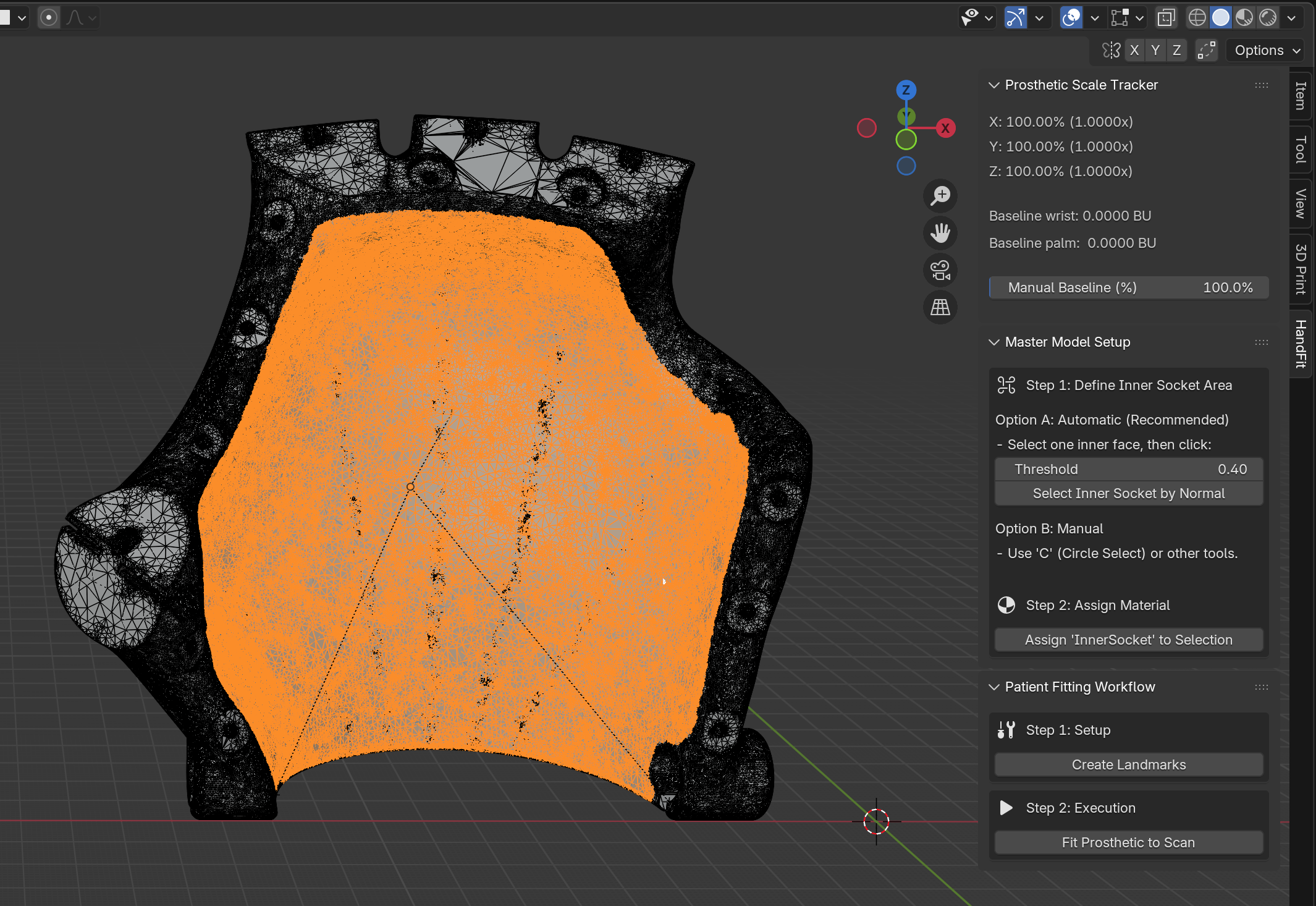
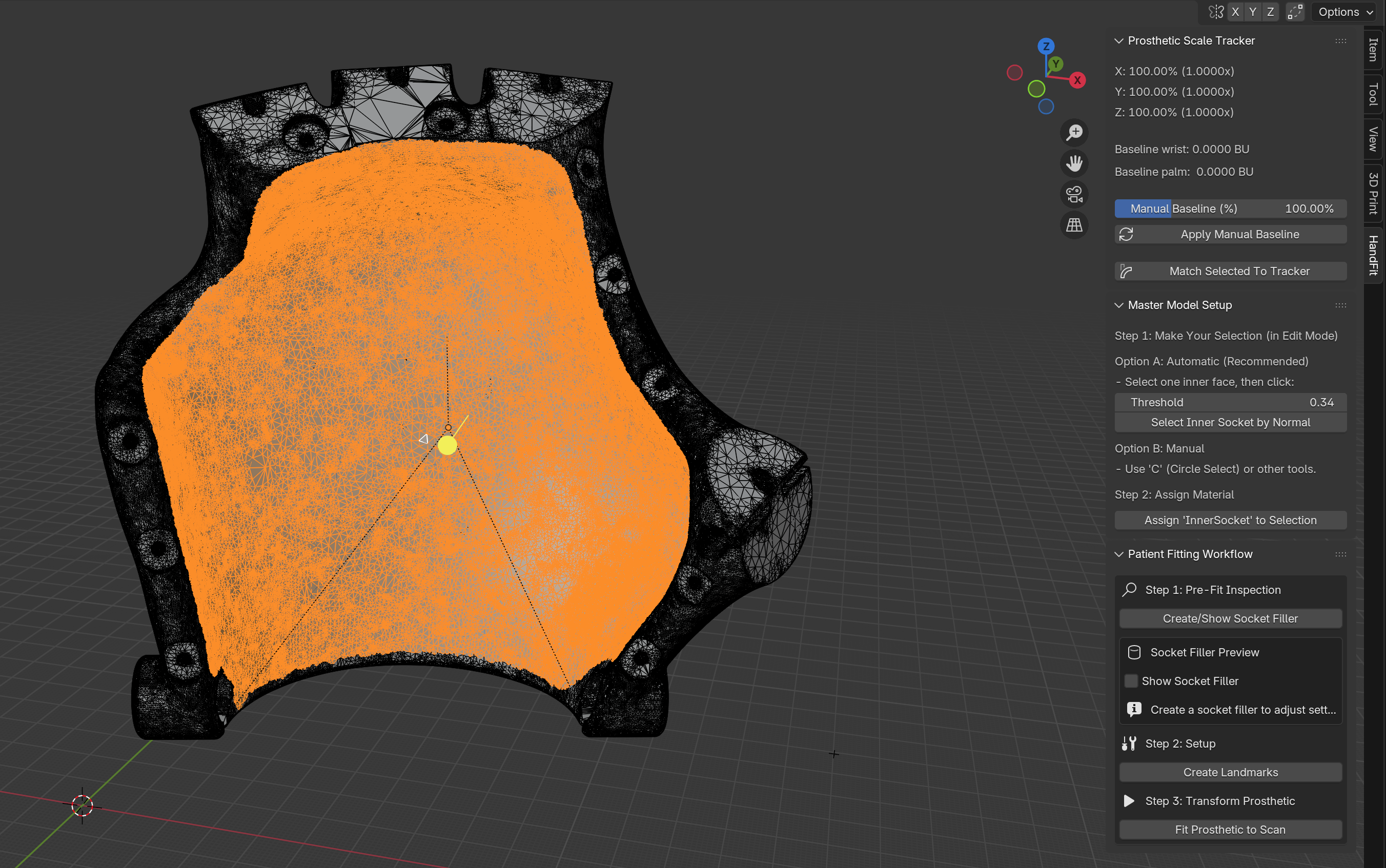
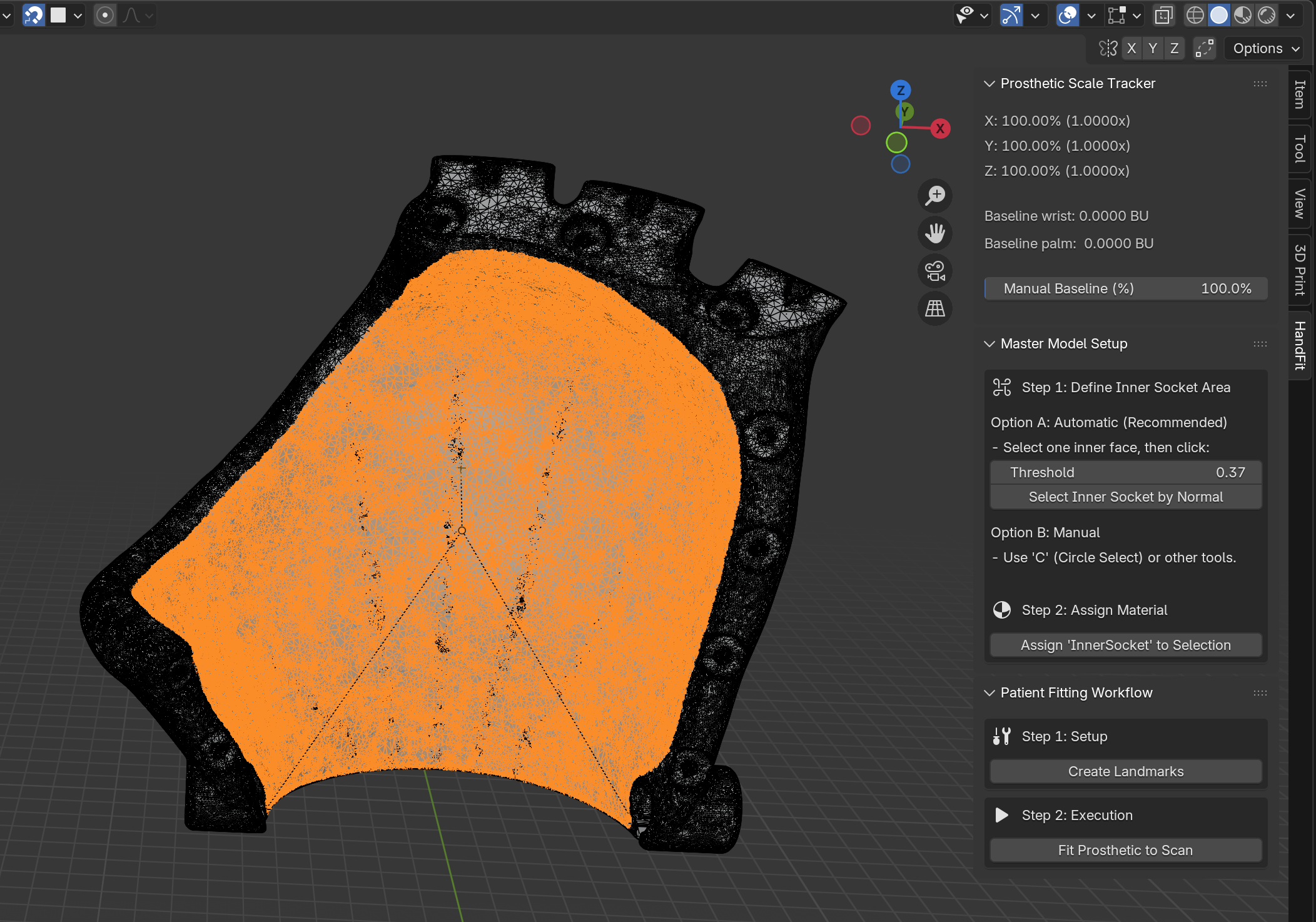
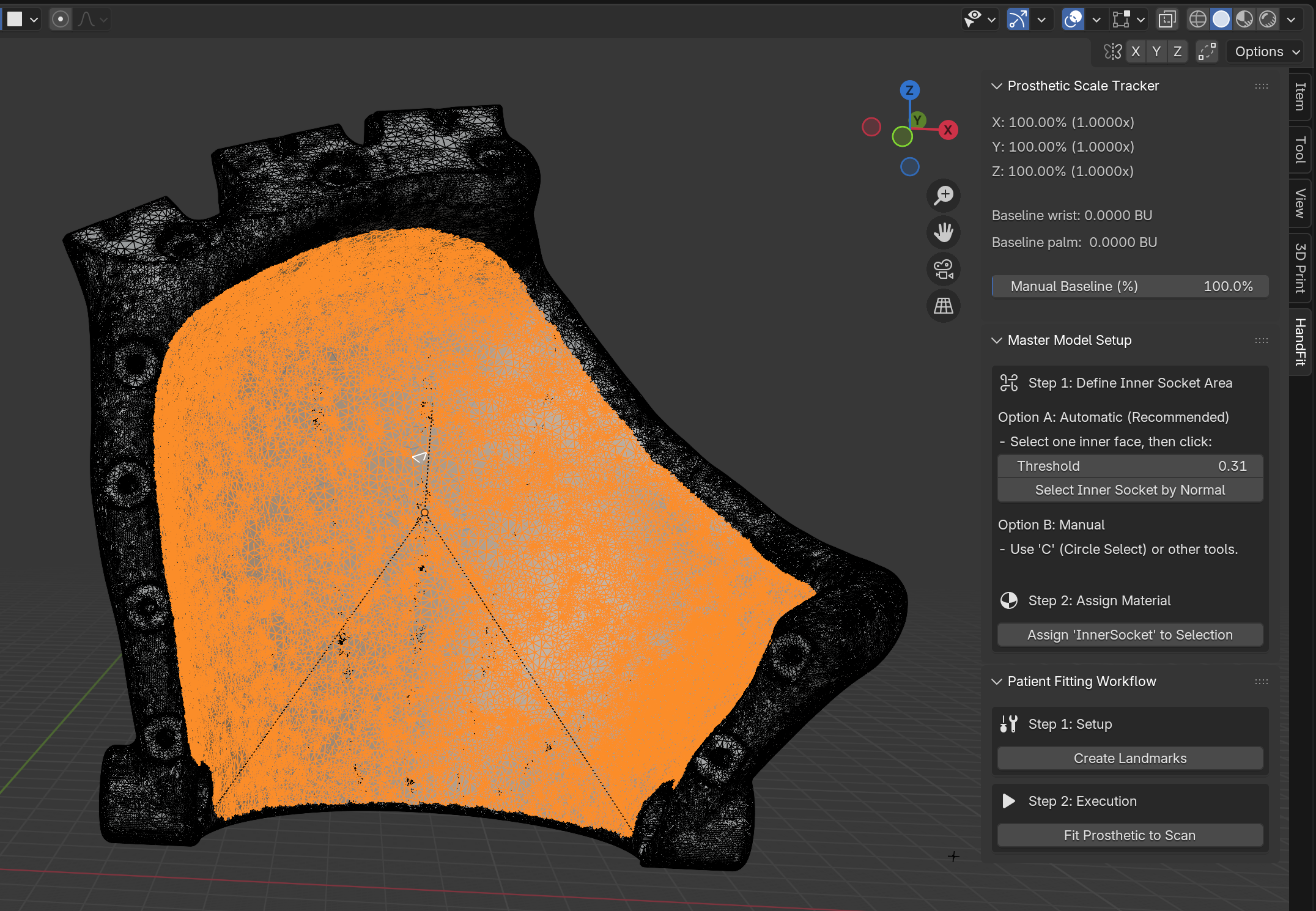
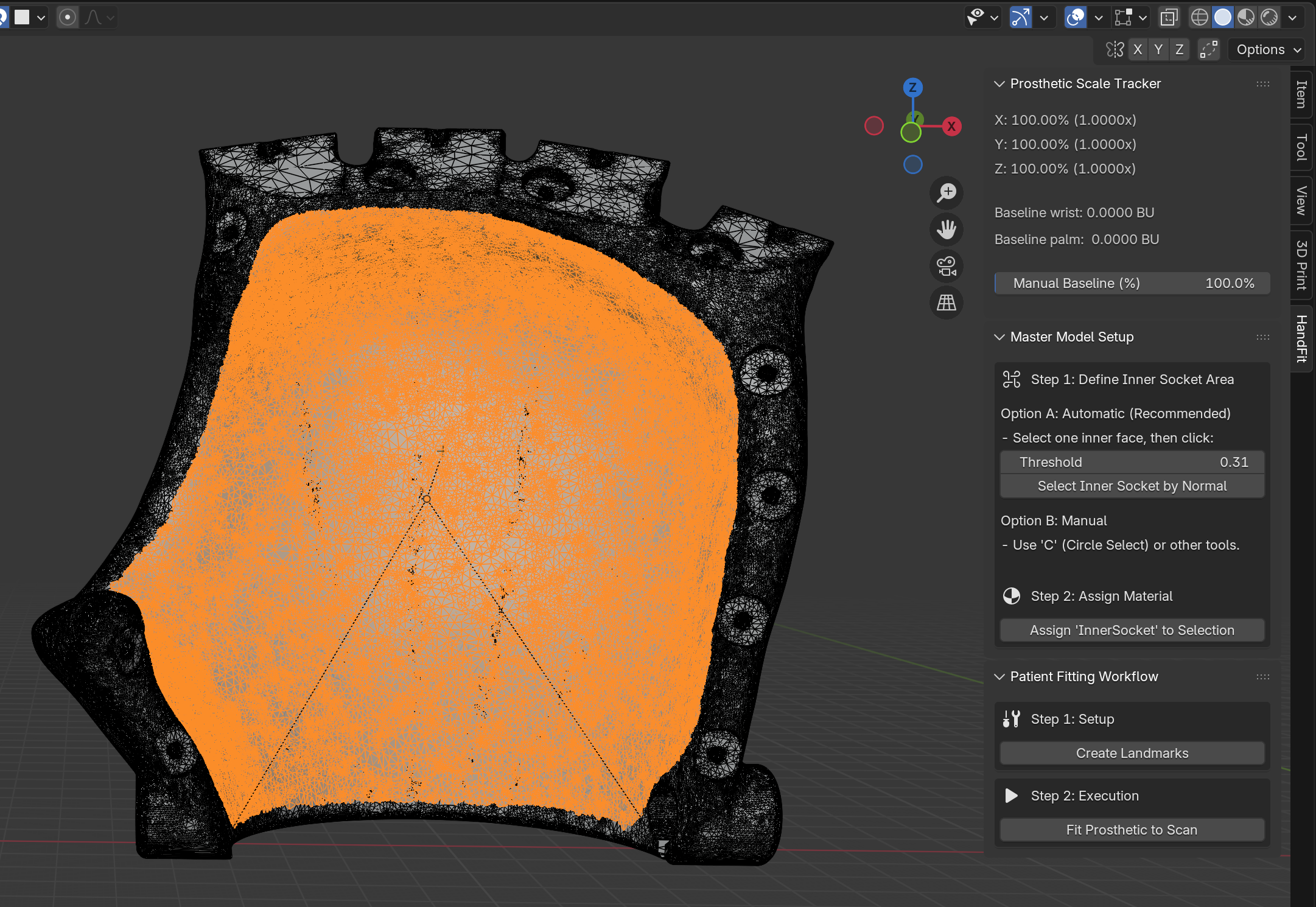
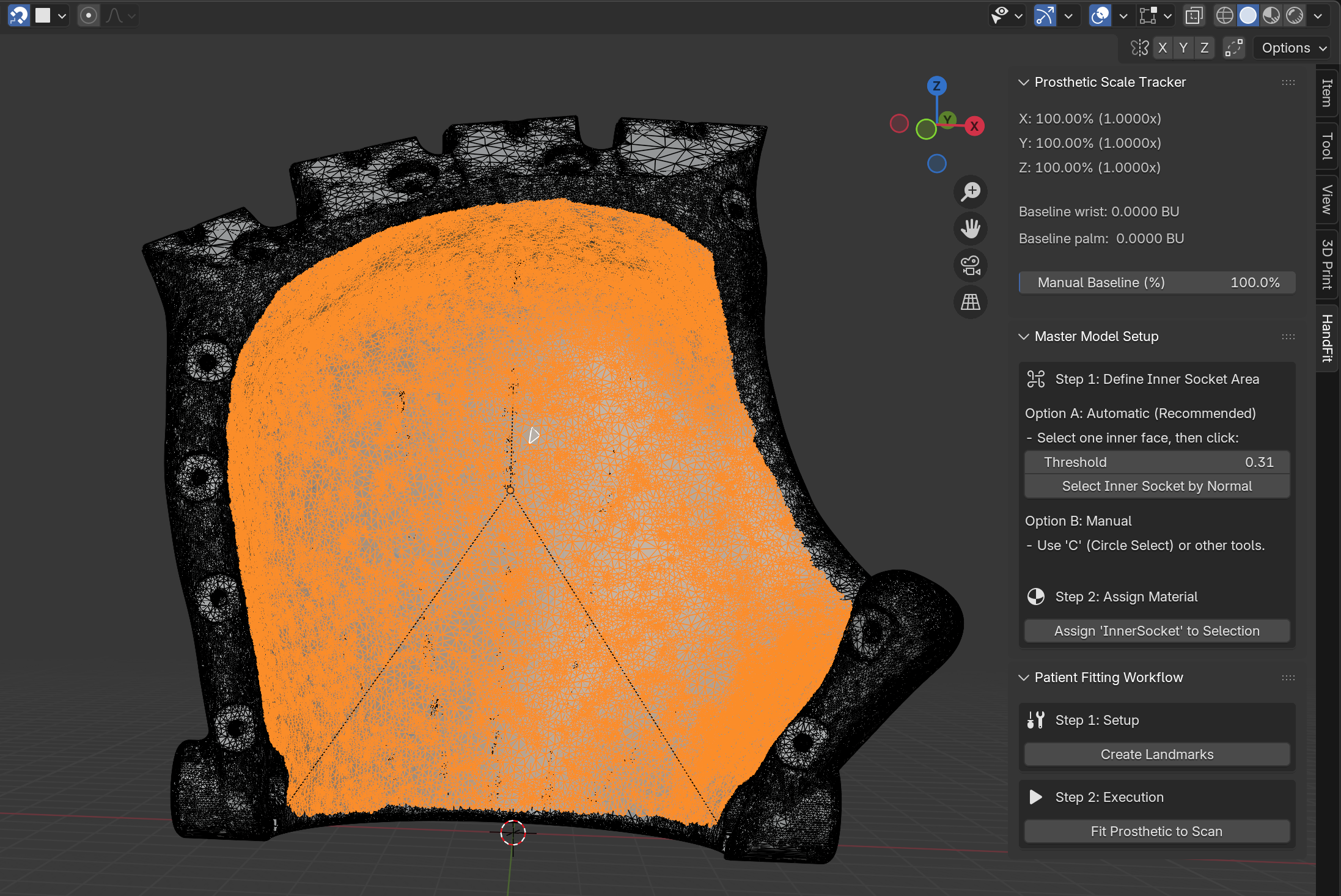
Import into Blender Open Blender, import the hand scan (.stl) and load the appropriate Master Model from the pre-configured library. |
30 sec |
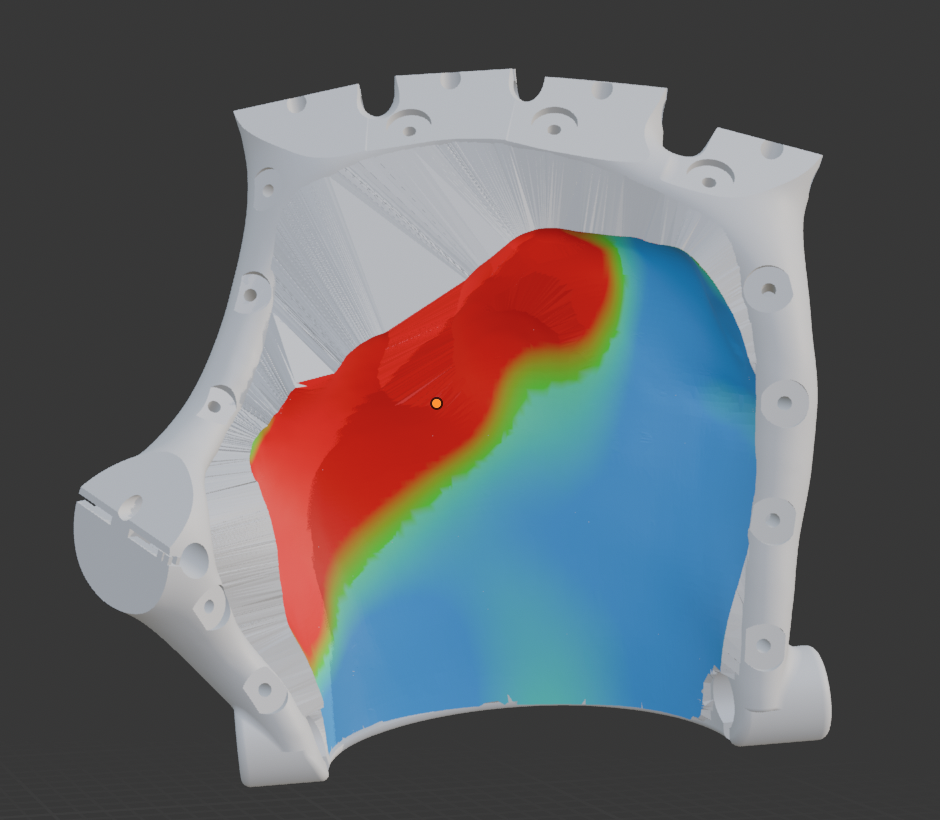
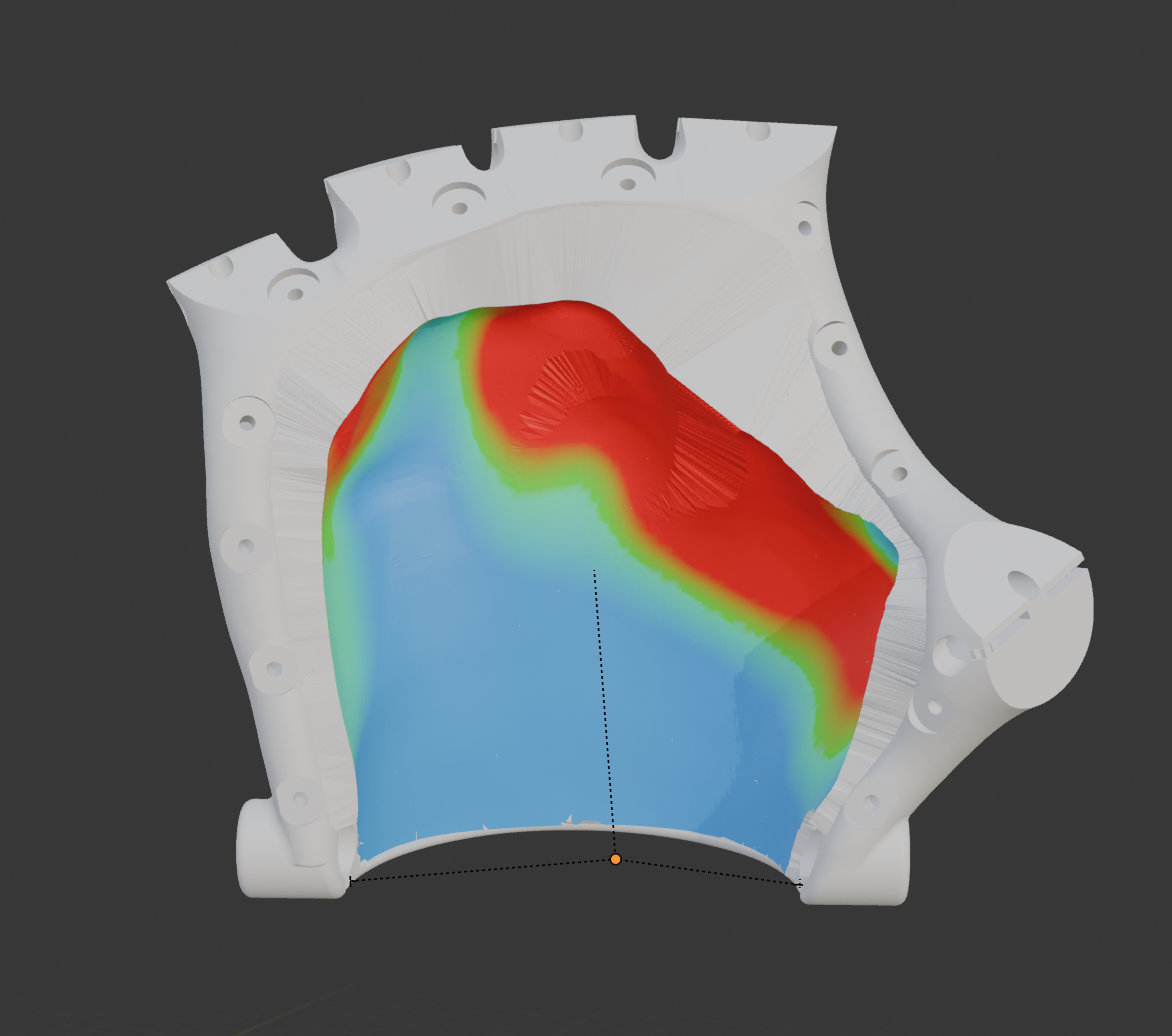
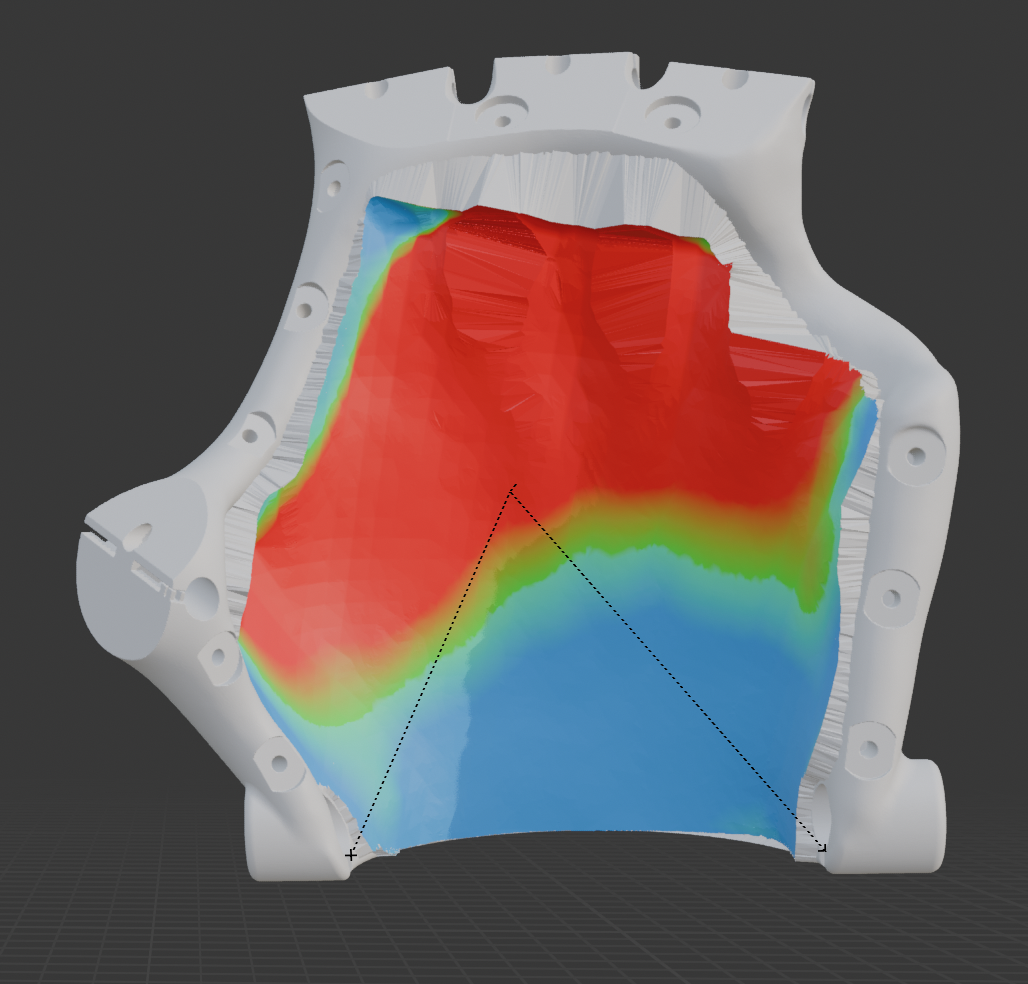
| 3 |
Place landmarks Click "Create Landmarks" and position the three points: left wrist, right wrist, and palm center. |
1 min |
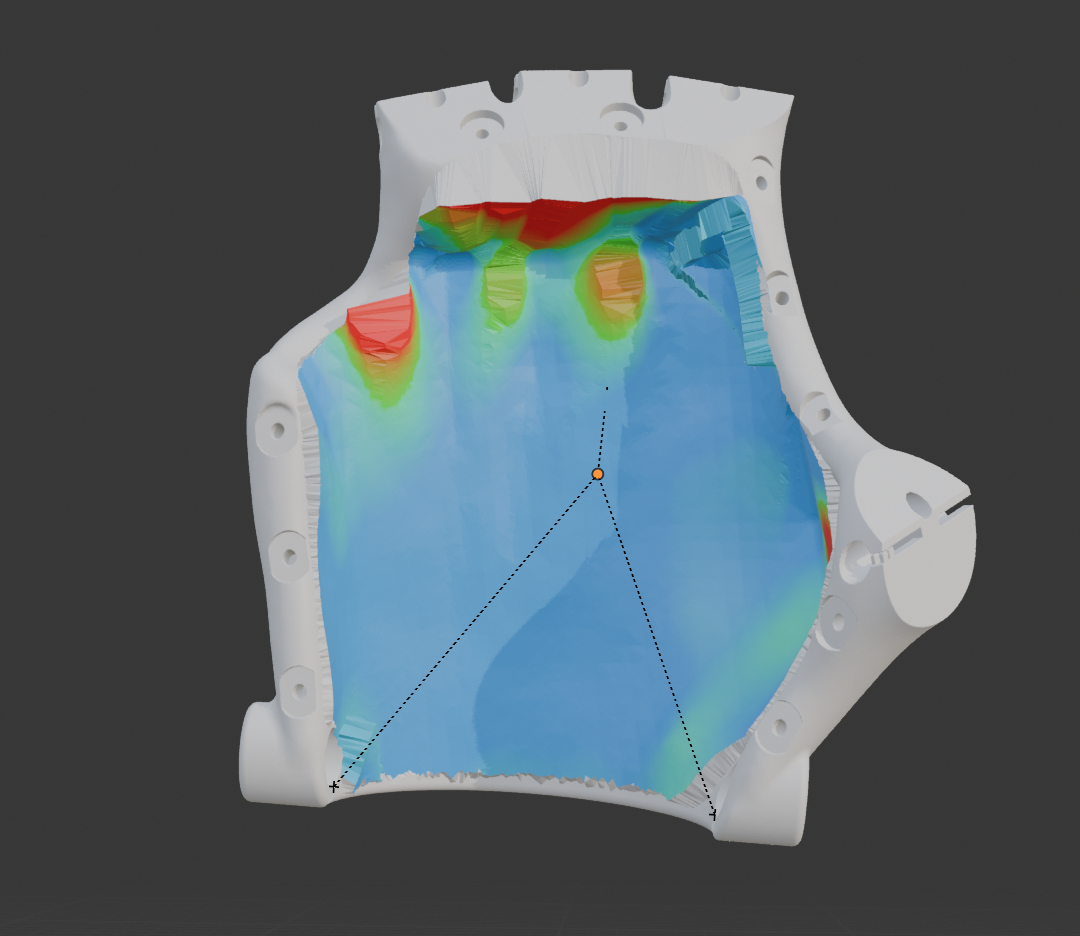
| 4 |
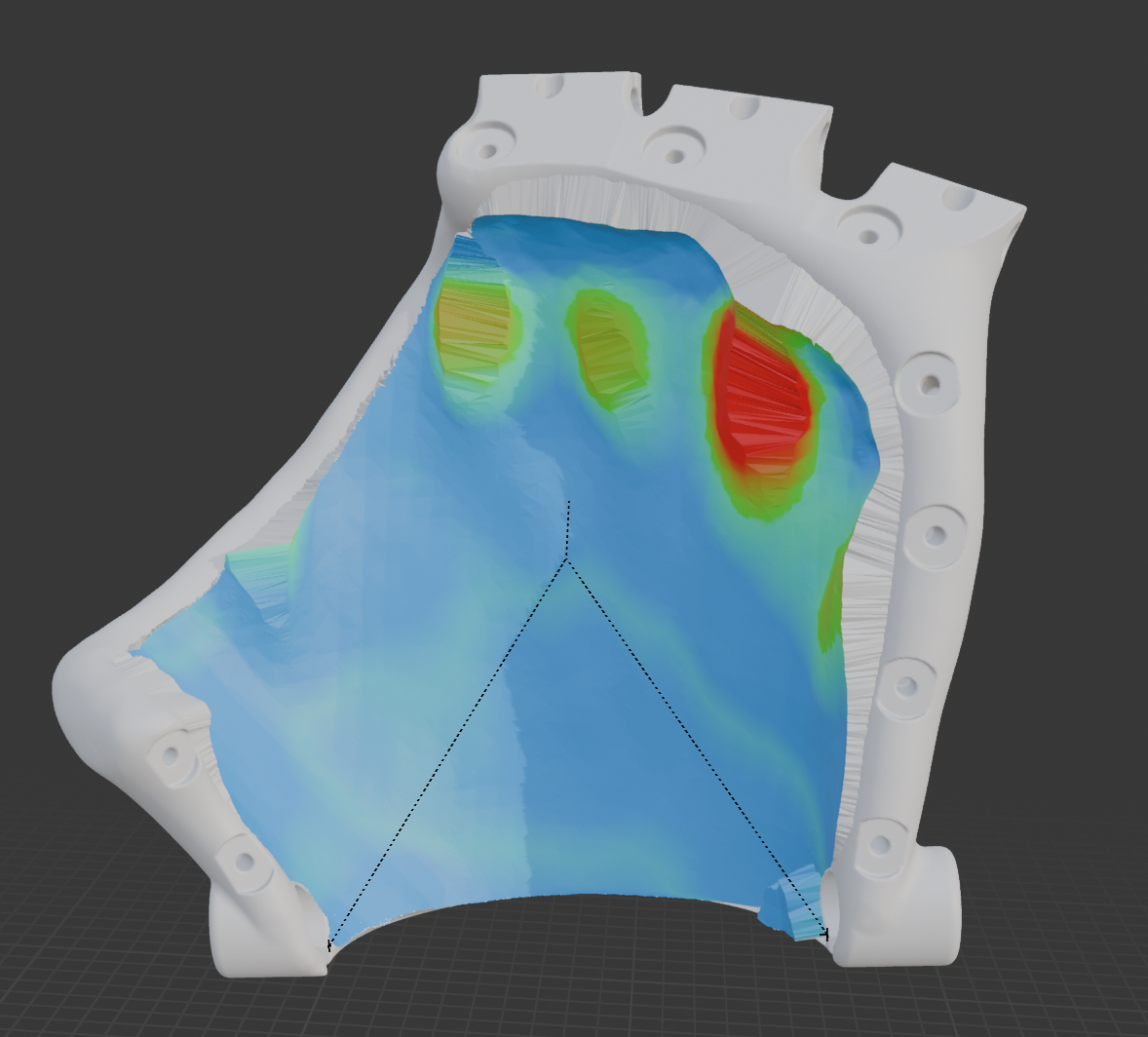
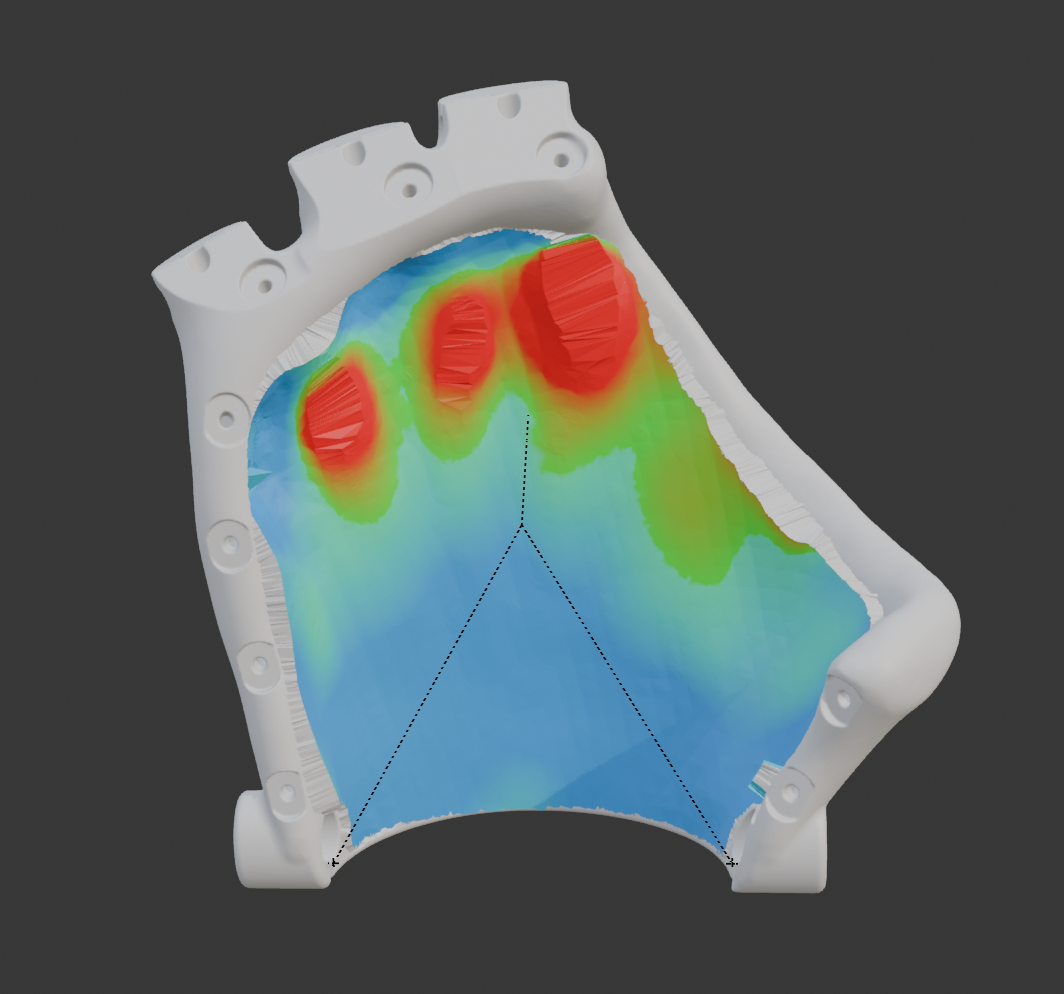
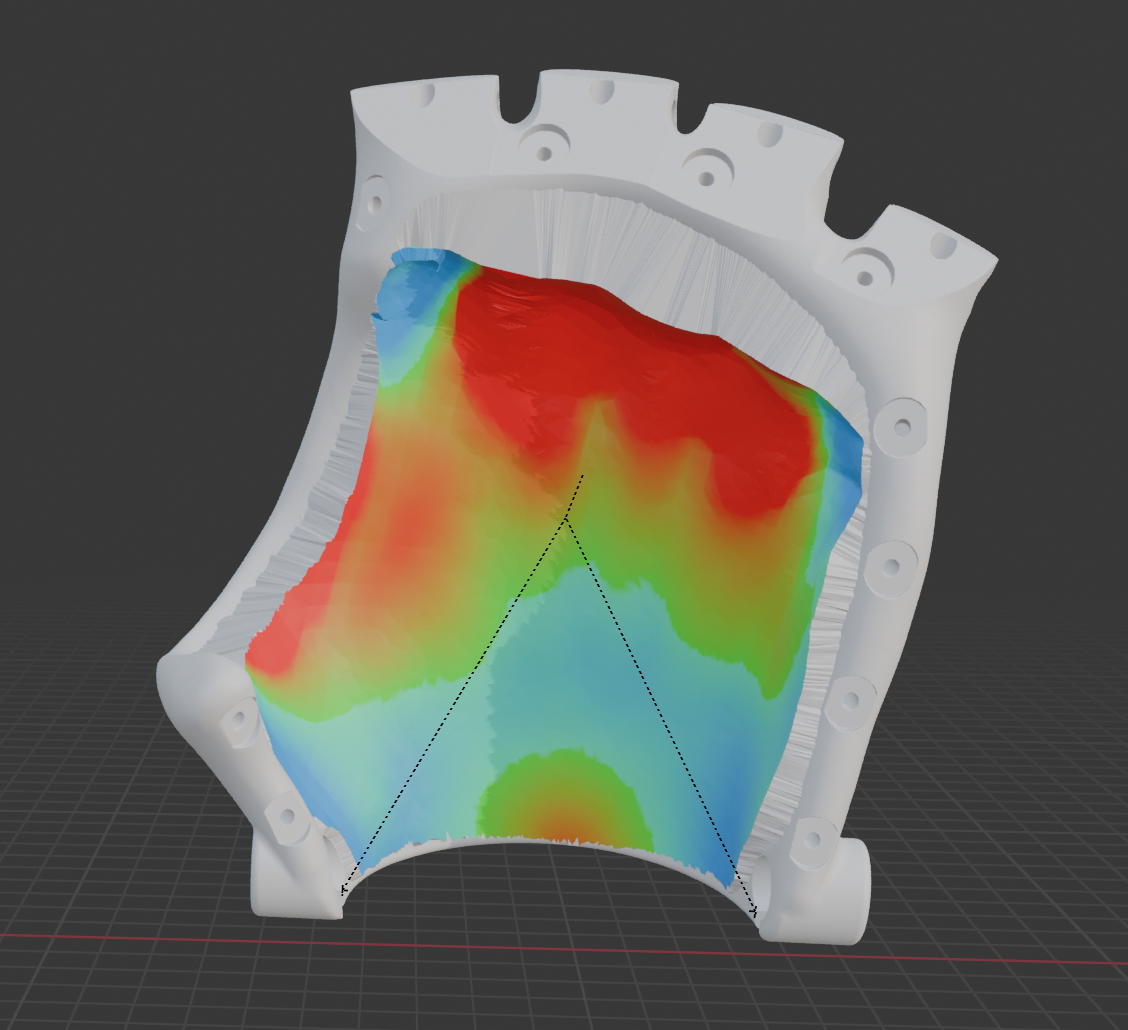
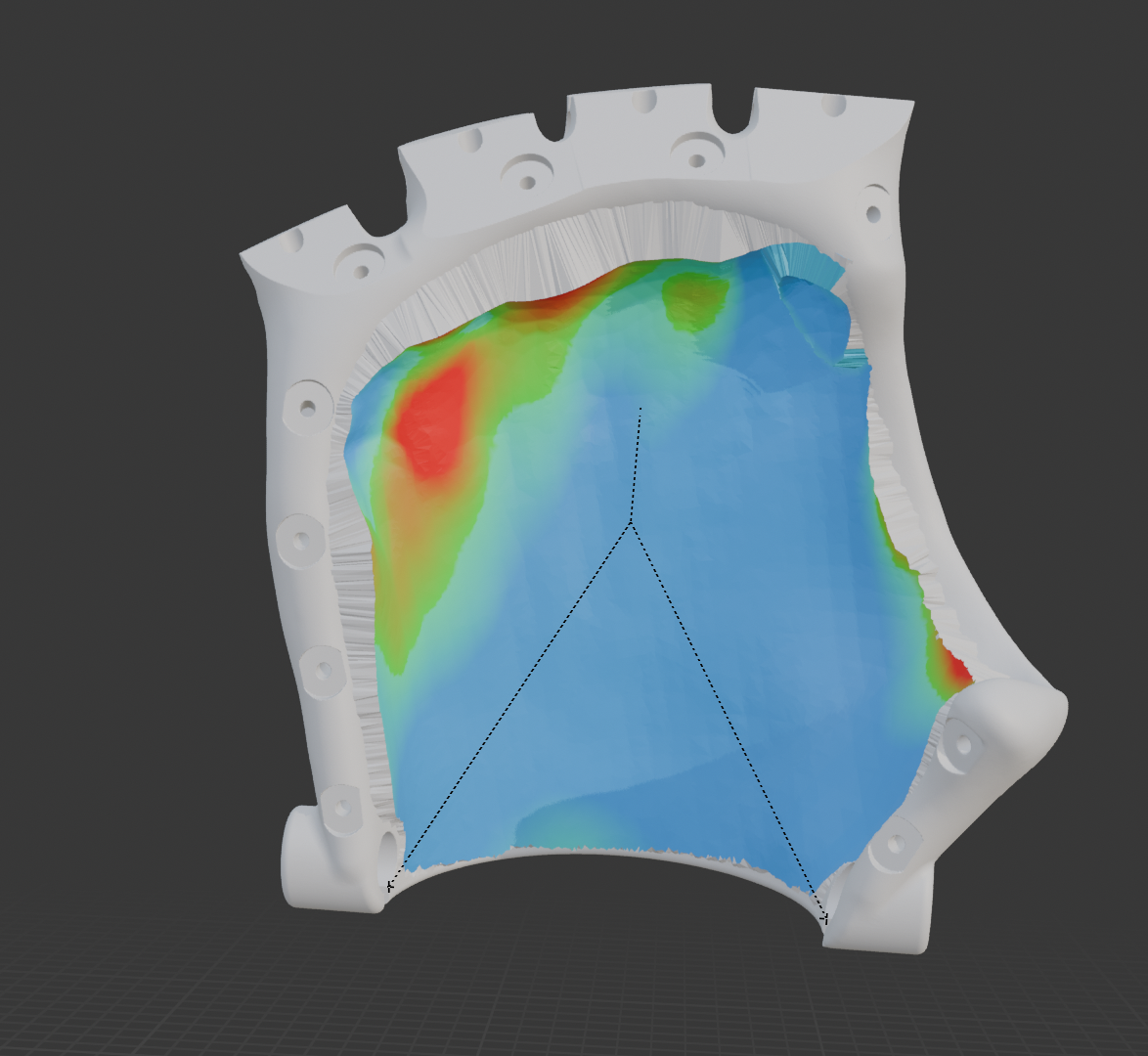
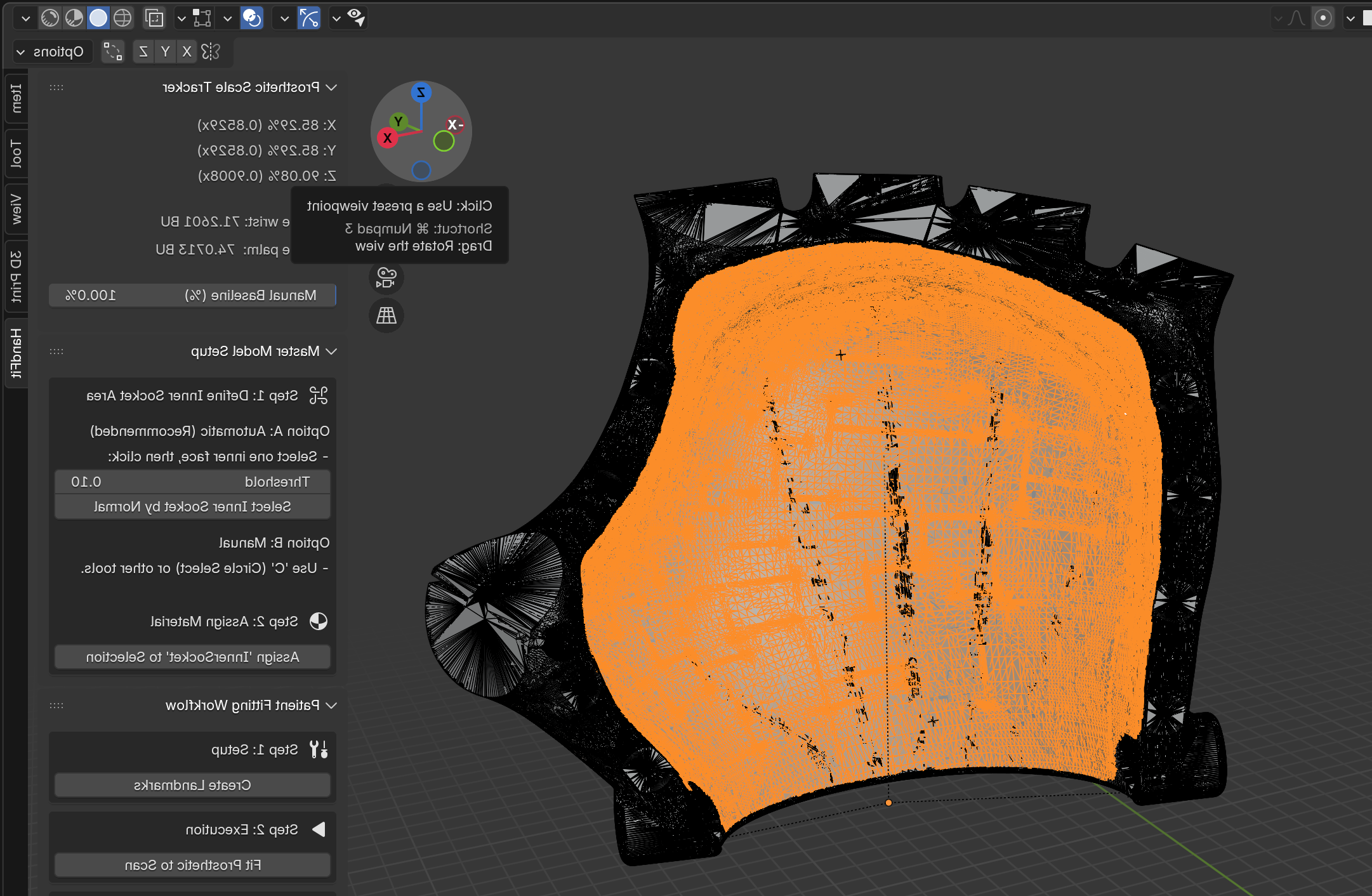
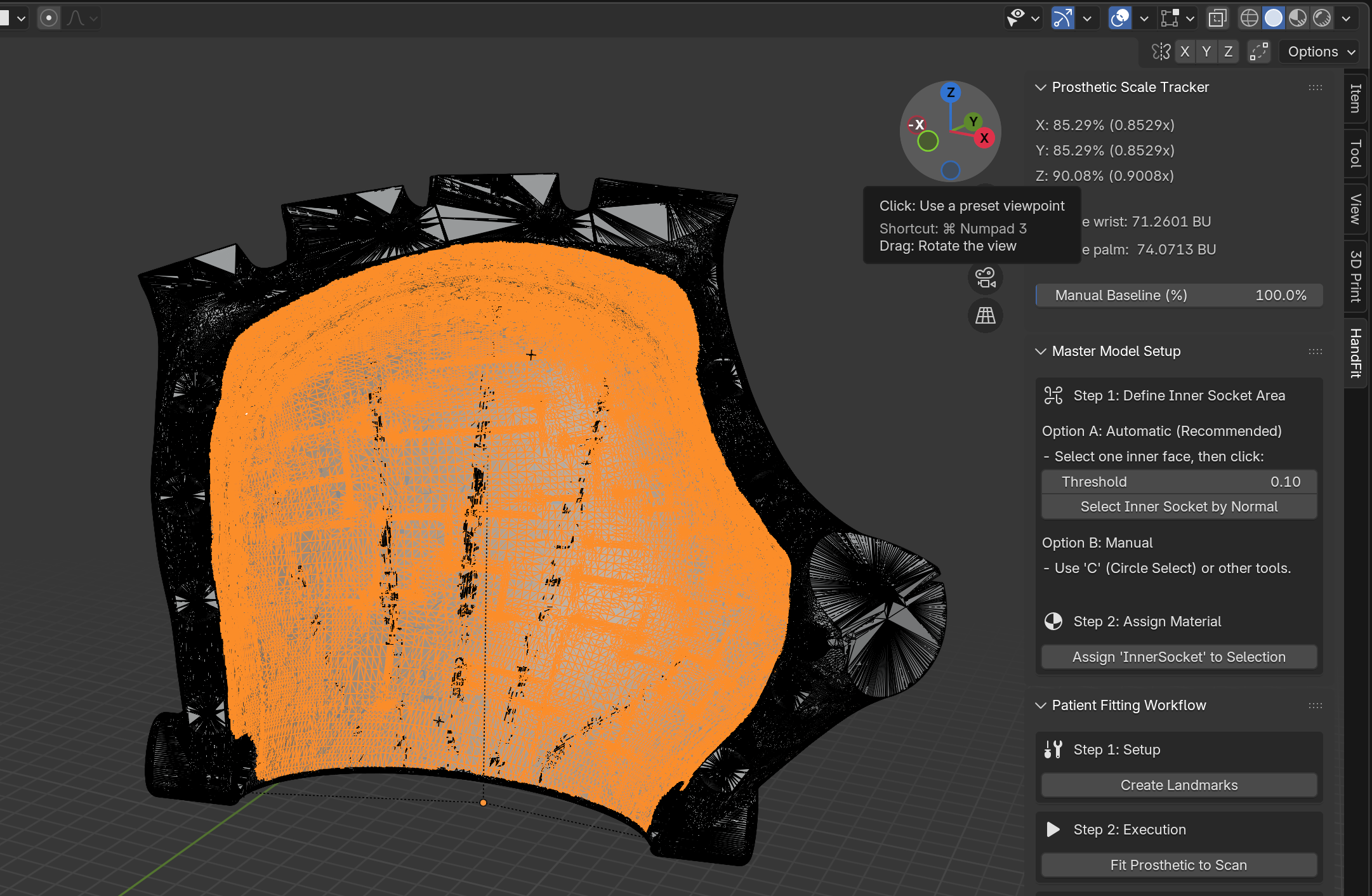
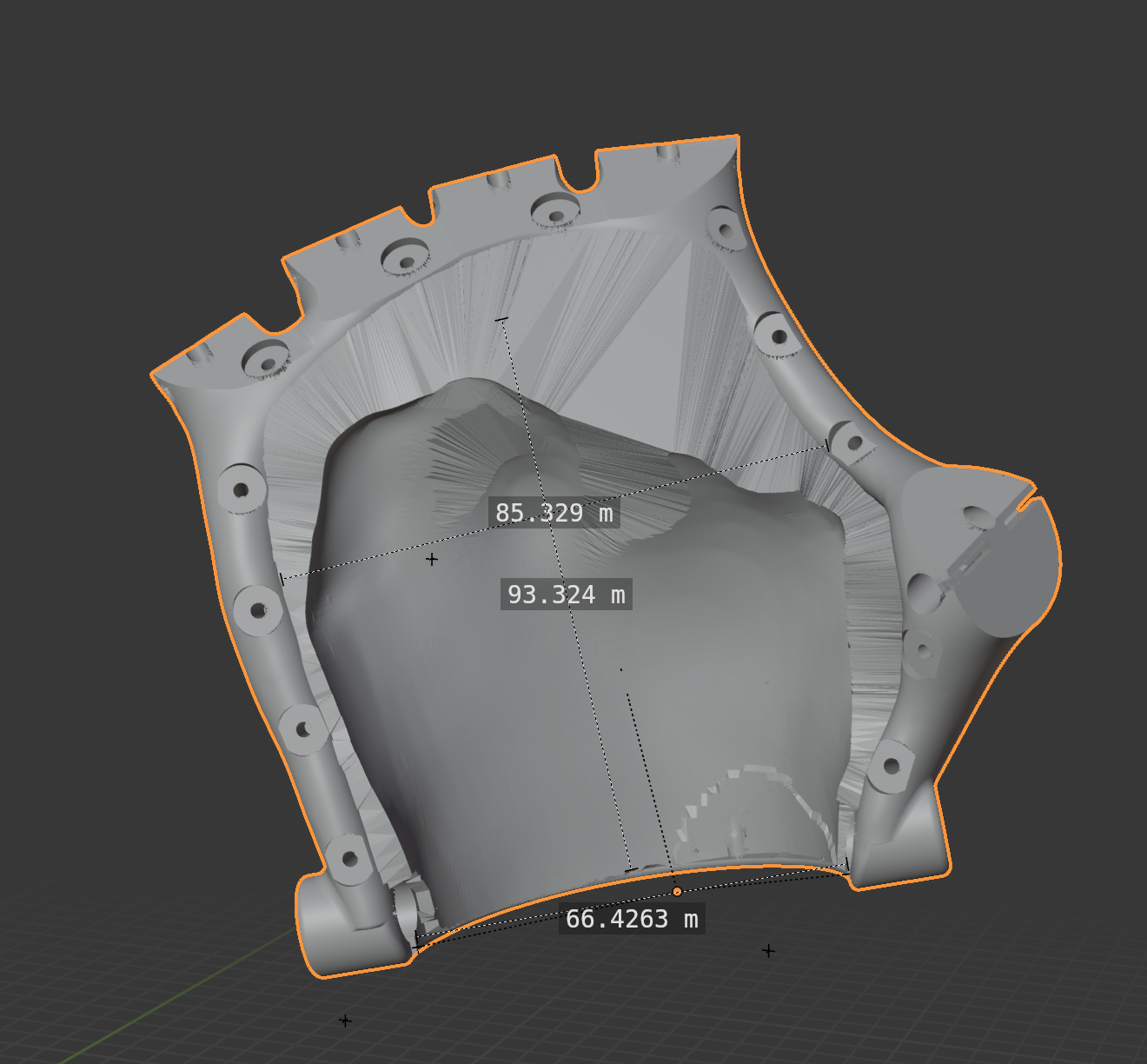
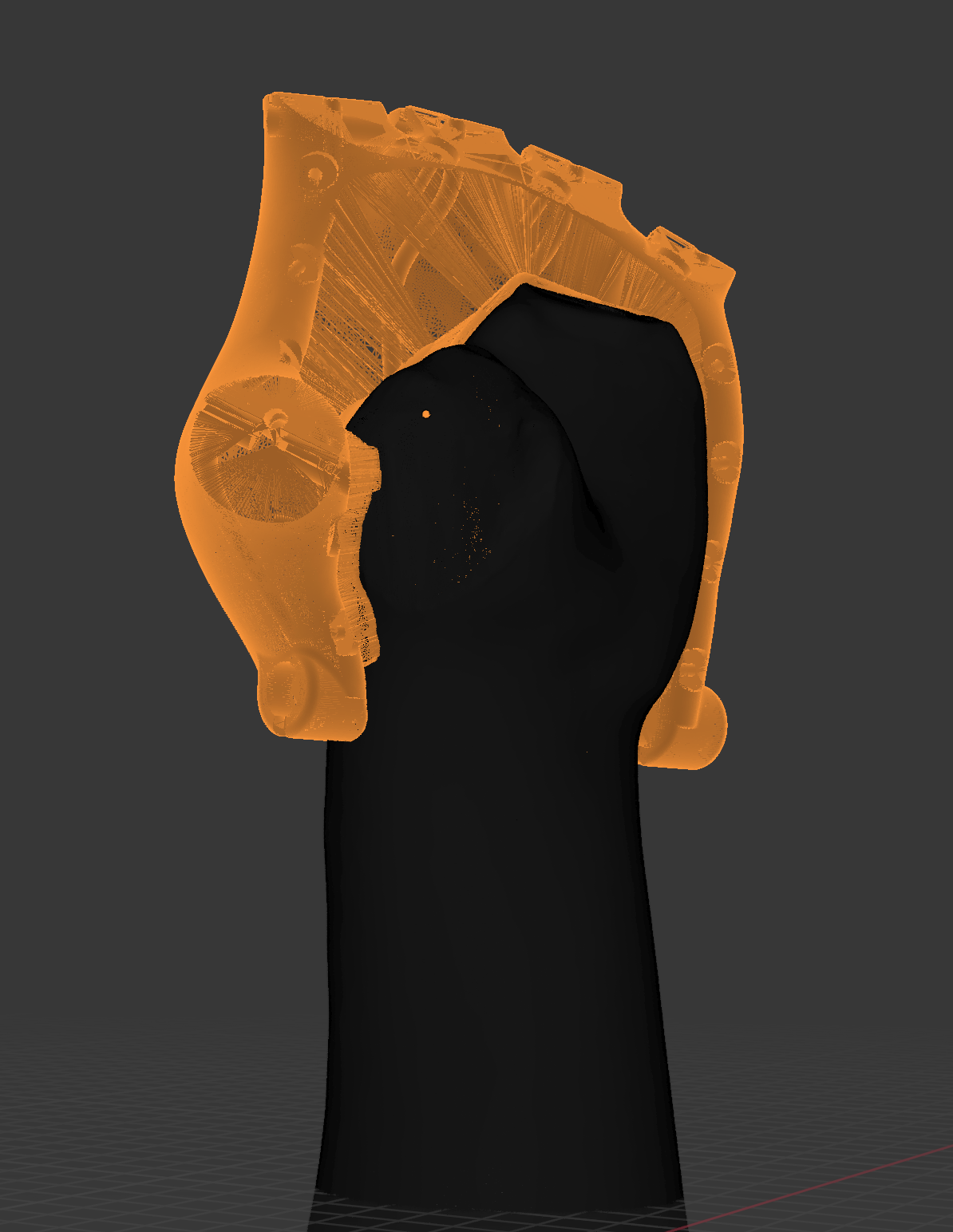
Click "Fit" HandFit automatically aligns, scales, and conforms the socket. Adjust the offset slider if needed. |
< 1 min |
| 5 |
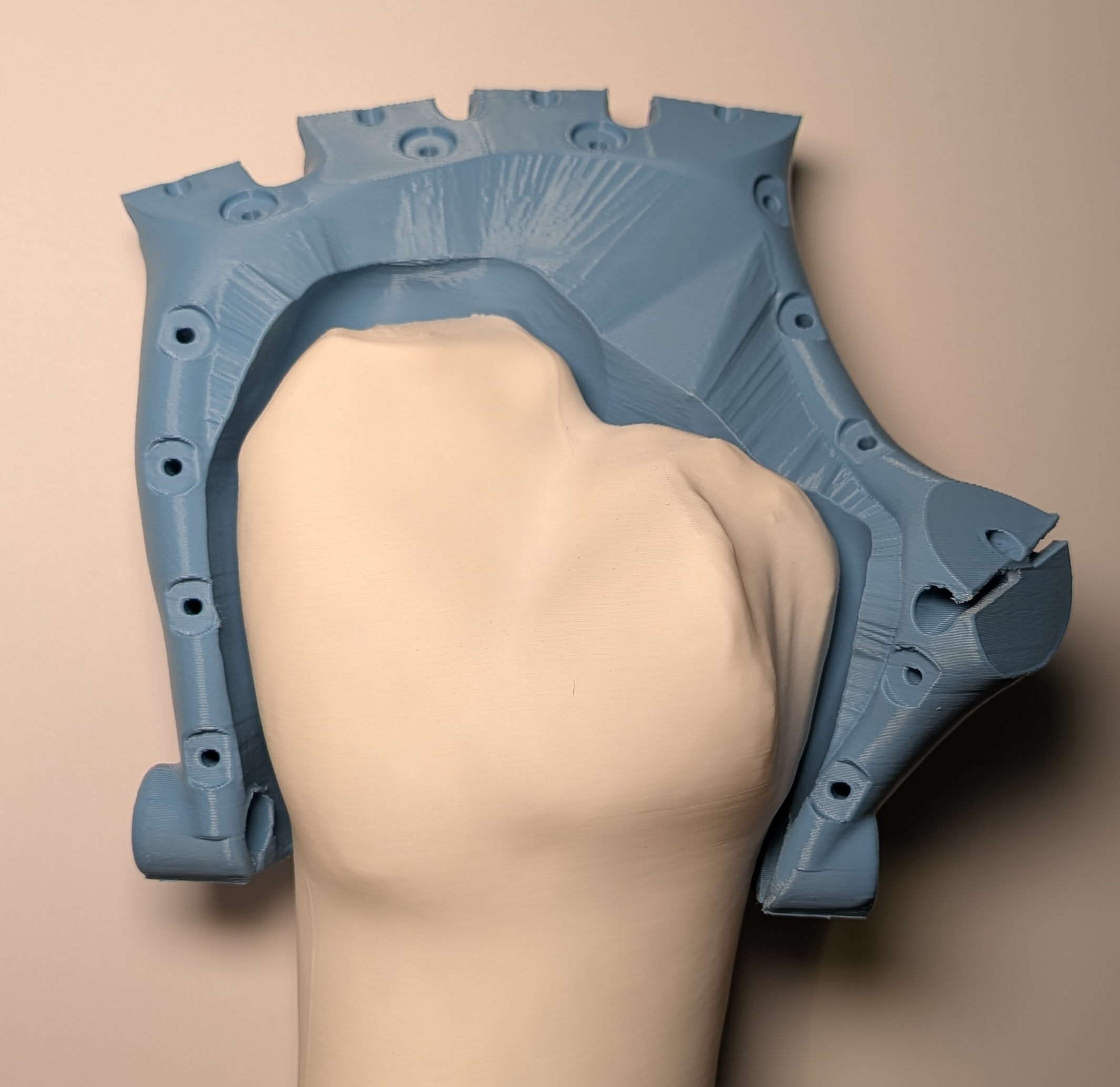
Export and print Click "Apply and Finalize," then export as .stl. Load into your slicer and print. |
30 sec |
Total time: ~5 minutes (excluding print time)